|
Самодельный намоточный станок.
В радиолюбительской практике, часто возникает необходимость намотать/перемотать различные обмотки трансформаторов, дросселей, реле и др. .
При разработке данного станка, ставились следующие задачи:
1. Малые габариты.
2. Плавный старт шпинделя.
3. Счётчик до 10000 витков (9999).
4. Намотка с автоматической укладкой провода. Шаг укладки (диаметр провода) 0.02 - 0.4мм.
5. Возможность намотки секционных обмоток без перенастройки.
6. Возможность закрепления и намотки каркасов без центрального отверстия.

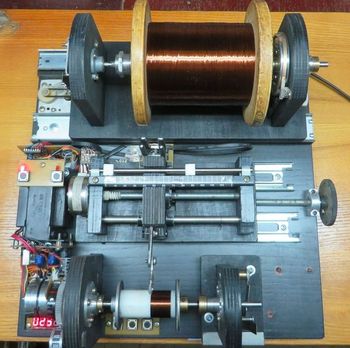
Рисунок 1.
Внешний вид намоточного станка.
Состав намоточного станка.
1. Подающая бобина (катушка с проводом).
2. Притормаживание (тормозной механизм).
3. Шаговый двигатель центровки бобины.
4. Шариковые мебельные направляющие.
5. Шторка оптических датчиков механизма центровки бобины.
6. Ручка перемещения позиционера на другую секцию при намотке секционных обмоток.
7. Кнопки ручного переключения направления укладки.
8. Светодиоды направления укладки.
9. Шаговый двигатель позиционера.
10. Шторки оптических датчиков границы намотки.
11. Винт позиционера.
12. Шариковые мебельные направляющие.
13. Наматываемая катушка.
14. Двигатель намотки.
15. Счётчик витков.
16. Кнопки настройки.
17. Оптический датчик синхронизации.
18. Регулятор скорости.
Устройство и принцип действия.
Подающий узел.
Подающий узел предназначен для закрепления на нём бобины с проводом, различных величин, и обеспечения натяжения провода.
В него входит механизм крепления бобин и механизм подтормаживания вала.

Рисунок 2.
Подающий узел.
Подтормаживание.
Без подтормаживания подающей бобины, намотка провода на каркасах будет рыхлая и качественной намотки не получится. Войлочная лента «2», тормозит барабан «1». Поворот рычага «3», натягивает пружину «4» - регулировка силы торможения. Для разной толщины провода, настраивается своё притормаживание. Здесь используются готовые детали видеомагнитофона.

Рисунок 3.
Подтормаживающий механизм.
Центровка бобины.
Малые габариты станка и расположение в непосредственной близости, наматываемой катушки и подающей бобины с проводом, потребовали ввести дополнительный механизм центровки подающей бобины.


Рисунок 4, 5.
Центрирующий механизм.
При намотке катушки, провод с бобины воздействует на шторку «5», выполненной виде “вилки” и шаговый двигатель «3», через редуктор с делением 6 и зубчатый ремень, по роликовым направляющим «4», автоматически сдвигает бобину в нужном направлении.
Таким образом, провод всегда находится по центру см. рис 4, рис 5:

Рисунок 6.
Датчики, вид сзади.
Состав и устройство датчиков.
19. Оптические датчики механизма центровки бобины.
5. Шторка перекрывающая датчики механизма центровки бобины.
20. Шторки перекрывающие датчики переключения направления позиционера.
21. Оптические датчики переключения направления позиционера.
Позиционер.
Шторками «20» рис. 6 - выставляется граница намотки. Шаговый двигатель, перемещает механизм укладчика, пока шторка не перекроет один из датчиков «21» рис. 6, после чего меняется направление укладки.
В любой момент можно изменить направление укладки кнопками «1» рис. 7.

Рисунок 7.
Укладчик.
Скорость вращения шагового двигателя «9» рис. 7, синхронизирована с помощью датчика «10», «11» рис 8, с вращением наматываемой катушки и зависит от диаметра провода установленного в меню. Диаметр провода, может быть выставлен 0.02 – 0.4мм. С помощью ручки «8» рис. 7, можно передвинуть весь позиционер в сторону, не изменяя границы намотки. Таким образом, можно намотать другую секцию в многосекционных каркасах.

Рисунок 8.
Оптодатчик.
Состав позиционера и оптодатчика (рис. 7-8).
1. Кнопки ручного переключения направления укладки.
2. Светодиоды направления укладки.
3. Шторки перекрывающие датчики переключения направления позиционера.
4. Линейный подшипник.
5. Капролоновая гайка.
6. Ведущий винт. Диаметр 8мм, шаг резьбы 1,25мм.
7. Шариковые мебельные направляющие.
8. Ручка перемещения позиционера на другую секцию при намотке секционных обмоток.
9. Шаговый двигатель.
10. Оптический датчик синхронизации.
11. Диск, перекрывающий датчик синхронизации. 18 прорезей.
Приёмный узел.

Рисунок 9.
Приёмный узел.


Рисунок 10, 11.
Приёмный узел.
1. Счётчик витков.
2. Коллекторный высокоскоростной двигатель.
3. Шестерня редуктора.
4. Кнопка «сброс счётчика».
5. Регулировка скорости.
6. Включатель «Старт намотки».
7. Крепёж наматываемой катушки.
Вращение наматываемой катушки, производит коллекторный высокооборотный двигатель через редуктор.
Редуктор состоит из трёх шестерён с общим делением 18. Это обеспечивает необходимый вращающий момент на малых оборотах.
Регулировка скорости двигателя, производится изменением питающего напряжения.


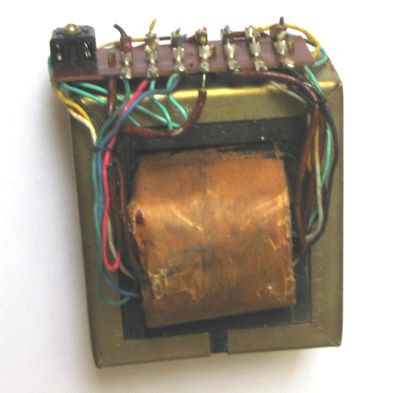
Рисунок 12, 13.
Крепление каркаса имеющего отверстие.
Конструкция приёмного узла позволяет закреплять, как каркасы имеющие центральное отверстие, так и каркасы, таких отверстий не имеющие, что хорошо видно на рисунках.


Рисунок 14, 15.
Крепление каркаса не имеющего отверстие.
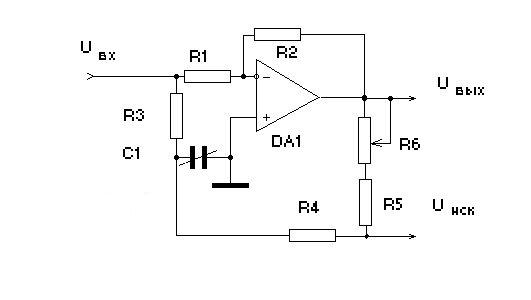
Электрическая схема.

Рисунок 16.
Электрическая схема намоточного станка.
Всеми процессами станка, управляет микроконтроллер PIC16F877.
Индикация количества витков и диаметра провода, отображается на светодиодном четырёх знаковом индикаторе. При нажатой кнопке «D», отображается диаметр провода, при отжатой количество витков.
Для изменения диаметра провода, нажать кнопку «D» и кнопками «+», «-» изменить значение. Установленное значение автоматически сохраняется в EEPROM. Кнопка «Zerro» - обнуление счётчика. Разъём «ISCP» служит для программирования микроконтроллера.
P.S. Чертежей механической части не существует, потому что устройство изготовлялось в одном экземпляре, и конструкция формировалась в процессе сборки.
В данной конструкции были использованы имеющиеся в разборке элементы и узлы (не имеющие маркировки) от видеомагнитофонов и принтеров.
Ни в коем случае я не настаиваю в точном повторении данной конструкции, а лишь как в использовании каких-либо узлов от неё в своих конструкциях.
Повторение данного устройства возможно опытными радиолюбителями, имеющие навыки работы с механикой и способными изменить конструкцию под свои, имеющиеся механические части.
Механическая часть соответственно, может быть реализована по другому.
Редукторы на двигателях, могут быть и с другим делением.
Критические элементы:
Чтобы программа работала правильно, необходимо соблюсти ряд условий, а именно;
Оптический датчик «17» рис 1. , может быть другой конструкции, но обязательно на 18 отверстий.
Винт позиционера, обязательно с шагом 1,25мм – это стандартный шаг для винта диаметром 8мм.
Шаговый двигатель позиционера 48 шагов/оборот, 7.5 градусов/шаг – это самые распространённые двигатели в оргтехнике.
Демонстрационный ролик работы станка:
Ниже в прикреплении (в архиве) собраны все необходимые файлы и материалы для сборки намоточного станка.
Если по сборке и наладке у кого-то возникнут какие либо вопросы, то задавайте их здесь на форуме. По возможности постараюсь ответить и помочь.
Желаю всем удачи в творчестве и всего наилучшего!
Miron63.
 Архив "Намоточный станок"."
Архив "Намоточный станок"."Поделись с друзьями:
Уважаемый посетитель, Вы зашли на сайт как незарегистрированный пользователь.
Мы рекомендуем Вам зарегистрироваться или войти на сайт под своим именем.
| Всего комментариев: 56 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 1 2 3 » | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 1-20 21-40 41-56 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||






 Двухполярный блок питания
Двухполярный блок питанияот 27.06.2026
Ответов: 1786
Паяльная станцияот 08.06.2026
Ответов: 21
Какие провайдеры интернета заслуживают доверия?от 01.05.2026
Ответов: 3
Нужна помощот 25.02.2026
Ответов: 3
Помогите распознать трансформаторот 25.02.2026
Ответов: 6
Востановление трансформатораот 25.02.2026
Ответов: 4
Измеритель транзисторов не выпаивая из платы.от 05.01.2026
Ответов: 6
Вкусная темаот 22.10.2025
Ответов: 9
Ремонт паяльной станции silverflo 8586dот 02.09.2025
Ответов: 14
БП S-250-12 (Китай)от 20.06.2025
Ответов: 2
 Добавлено 30.07.2011
Добавлено 30.07.2011Просмотров 1326546
Лабораторный БП из компьютерного БП формата АТХ
 Добавлено 04.03.2012
Добавлено 04.03.2012Просмотров 1272421
Пусковое устройство для автомобиля
 Добавлено 15.01.2012
Добавлено 15.01.2012Просмотров 1154642
TL431, что это за "зверь" такой?
 Добавлено 17.10.2011
Добавлено 17.10.2011Просмотров 1137793
Двух-полярный лабораторный блок питания своими руками
 Добавлено 19.10.2013
Добавлено 19.10.2013Просмотров 983755
Компараторы, как они работают?
 Добавлено 14.10.2011
Добавлено 14.10.2011Просмотров 972240
Переделка компьютерного блока питания
 Добавлено 13.12.2016
Добавлено 13.12.2016Просмотров 839934
Переключение обмоток трансформатора лабораторных источников питания. Часть первая.
 Добавлено 14.06.2013
Добавлено 14.06.2013Просмотров 828752
Прописные истины для новичков.
 Добавлено 10.09.2012
Добавлено 10.09.2012Просмотров 824606
Способ снижения искажений и уровня помех в усилителях.
 Добавлено 19.10.2014
Добавлено 19.10.2014Просмотров 732957
Двух-канальный мощный лабораторный блок питания.
 Добавлено 30.09.2015
Добавлено 30.09.2015Просмотров 694770
Переключение обмоток трансформатора лабораторных источников питания. Часть вторая.
 Добавлено 10.08.2013
Добавлено 10.08.2013Просмотров 689309
Испытание электронных ламп
 Добавлено 09.04.2014
Добавлено 09.04.2014Просмотров 630577
TL494, что это за "зверь" такой?
 Добавлено 17.08.2018
Добавлено 17.08.2018Просмотров 581383
Простой лабораторный блок питания
 Добавлено 20.05.2016
Добавлено 20.05.2016Просмотров 512997
Ремонт трансформатора подсветки монитора Samsung 940N.
 Добавлено 19.05.2013
Добавлено 19.05.2013Просмотров 500617
"Электронный дроссель".
 Добавлено 09.11.2011
Добавлено 09.11.2011Просмотров 497695
Определяем тип трансформатора по номеру.
 Добавлено 23.07.2015
Добавлено 23.07.2015Просмотров 452682
Германий превыше всего
 Добавлено 05.05.2011
Добавлено 05.05.2011Просмотров 444506
Зарядное устройство с защитой.
 Добавлено 12.12.2013
Добавлено 12.12.2013Просмотров 402971
Мощный германиевый усилитель
 Добавлено 08.05.2011
Добавлено 08.05.2011Просмотров 392146
sPlan 7.0. Подробное руководство.
 Добавлено 05.04.2012
Добавлено 05.04.2012Просмотров 379502
Предпусковое зарядное устройство Орион PW 415
 Добавлено 01.03.2016
Добавлено 01.03.2016Просмотров 368394
Самодельная цифровая паяльная станция DSS.
 Добавлено 16.12.2013
Добавлено 16.12.2013Просмотров 356640
Шим-контроллеры серии UC184x, UC284x, UC384x
 Добавлено 31.01.2020
Добавлено 31.01.2020Просмотров 353632
Тороидальные трансформаторы
 Добавлено 30.07.2014
Добавлено 30.07.2014Просмотров 350479
Ламповый усилитель для компьютера.
 Добавлено 11.12.2011
Добавлено 11.12.2011Просмотров 343820
Информационная панель LCDIP2DS.
 Добавлено 17.10.2012
Добавлено 17.10.2012Просмотров 340032
Проектируем выходной трансформатор для лампового усилителя
 Добавлено 05.04.2017
Добавлено 05.04.2017Просмотров 337793
Доктор фьюзов «Atmega fusebit doctor».
 Добавлено 29.12.2012
Добавлено 29.12.2012Просмотров 327534
 Всего: 8462
Всего: 8462  Новых за месяц: 26 Новых за неделю: 4 Новых вчера: 0 Новых сегодня: 0
Новых за месяц: 26 Новых за неделю: 4 Новых вчера: 0 Новых сегодня: 0  Новый пользователь:
Новый пользователь: сайт за текущий день:
