|
Мишень «Биатлон»
Аннотация:
В статье рассматривается самостоятельное изготовление мишени биатлонного типа для пневматического тира. Управление мишенью осуществляется по радиоканалу с использованием микроконтроллеров ESP8266.

Рисунок 1. Внешний вид мишени с фронта.
Посмотрите демонстрационное видео работы мишени биатлонного типа;
Так-же это видео в более высоком разрешении можно посмотреть на РУТУБЕ:
Пульт управления мишенью
Схема электрическая принципиальная Пульта управления мишенью показана на рисунке.

Рисунок 2. Схема пульта управления.
Пульт управления мишенью построен на микроконтроллере ESP8266 (в исполнении платы ESP-12F). Питание на схему подается нажатием кнопки SA1 («Подъем мишени»). Индикатор D1 («Вкл/Откл») указывает на подачу питания на схему. Индикатор D2 («Сигнал») указывает на передачу сигнала для установки мишени в исходное состояние. Остальные элементы схемы обеспечивают приведение микропроцессора в рабочее состояние.
Передача сигнала на исполнительное устройство (мишень) осуществляется по протоколу «ESP NOW». В программном коде заложена передаваемая комбинация (0b00000001), которая опознается исполнительным устройством как команда «Поднять мишень». Программный код Пульта управления прилагается к данной статье. Физический МАС-адрес приемного устройства мишени заменяется программно. Его значение: 32-AE-A4-07-0D-66.
При отжатии кнопки «Подъем мишени» питание схемы отключается.
Устройство питается он двух батарей формата AAA.
Устойчивая связь с Блоком управления мишенью обеспечивается на расстоянии около 100 метров на встроенные антенны. При применении штатных ненаправленных штыревых антенн для платы ESP-07 дальность связи может быть увеличена до 400 метров. При применении направленных антенн – до 3000…4000 метров (по материалам публикаций).
Печатная плата Пульта управления показана на рисунке.
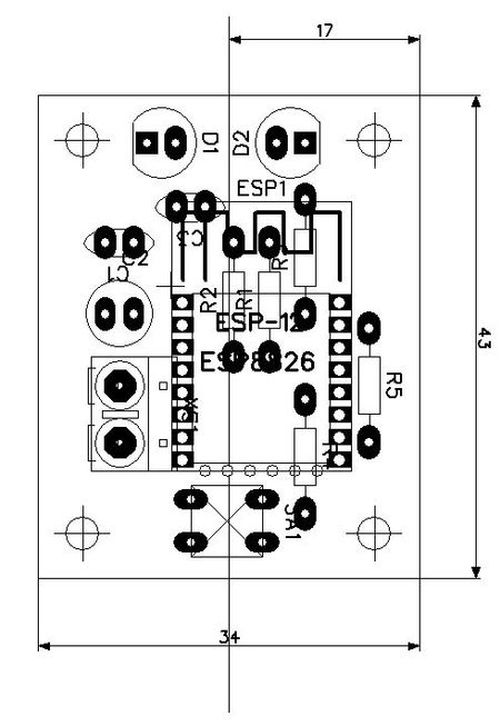
Рисунок 3. Печатная плата Пульта управления мишенью (со стороны радиодеталей).
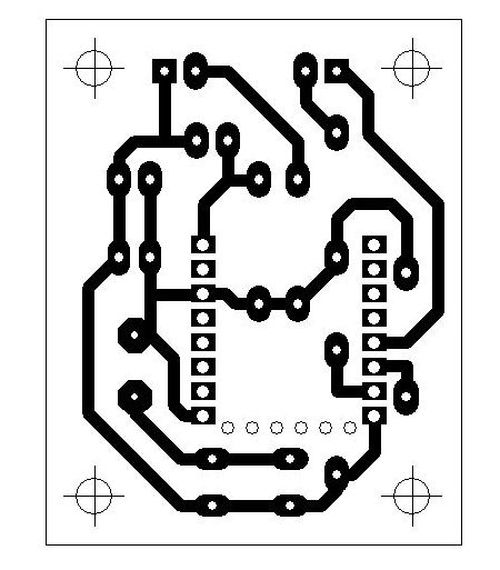
Рисунок 4. Печатная плата Пульта управления мишенью (со стороны дорожек).
Внешний вид Пульта управления мишенью показан на рисунке.
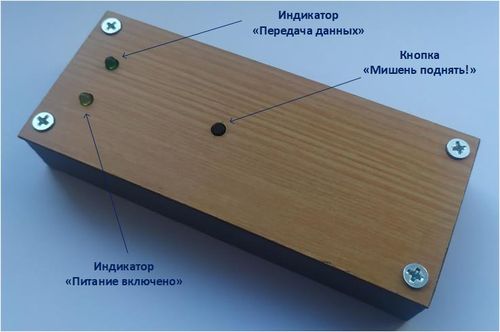
Рисунок 5. Внешний вид Пульта управления мишенью.
Расположение деталей внутри корпуса Пульта управления мишенью показано на рисунке.

Рисунок 6. Внешний вид Пульта управления мишенью со снятой крышкой.
Блок управления мишенью
Схема электрическая принципиальная Блока управления мишенью показана на рисунке.

Рисунок 7. Схема электрическая принципиальная Блока управления мишенью.
Блок управления мишенью расположен в пластиковой коробке на тыльной стороне мишени и построен на микроконтроллере ESP8266 (в исполнении платы ESP-12F).
Питание на схему подается от источника питания 5 Вольт. В качестве источника питания может использоваться зарядное устройство смартфона/планшета, обеспечивающего ток не менее 2 Ампер. В полевых условиях, где нет возможности подключиться к электросети, для питания устройства может использоваться автономный источник питания, типа powerbank.
Питание микроконтроллера ESP8266 обеспечивается напряжением 3.3 Вольта через микросхему стабилизатора питания DA1 (LM1117-3.3). Индикатором подачи подача питания на устройство является светодиод D1 («Вкл/Откл»).
Механический подъем всех пяти мишеней («убоек») осуществляется сервоприводом M1. В устройстве использован сервопривод Tower Pro MG995. Сервопривод питается от основного источника питания 5 Вольт.
При подаче питания на устройство в микроконтроллере программно устанавливается MAC-адрес 32-AE-A4-07-0D-66. Можно установить любой MAC-адрес устройство, в том числе и оставить физический, установленный производителем. Но при этом новый MAC-адрес мишени будет необходимо внести в программный код Пульта управления мишенью.
Взаимодействие Пульта управления с Блоком управления осуществляется по радиоканалу с использованием протокола «ESP NOW». В программном коде заложена ожидаемая в посылке комбинация (0b00000001), которая опознается исполнительным устройством как команда «Поднять мишень».
Микроконтроллер ESP8266 после включения устройства ожидает сигнал на приведение мишени в исходное состояние. При поступлении сигнала с Пульта управления мишенью микроконтроллер подает команду на сервопривод для установки всех убоек в вертикальное положение. Установка убоек в вертикальное положение осуществляется синхронно с помощью подъемной планки, приводимой в движение рычагом сервопривода. После подъема убоек сервопривод и подъемная планка возвращаются в исходное положение. Убойки удерживаются в вертикальном положении ферритовыми магнитами. При попадании пули, убойка отрывается от ферритового магнита и падает внутрь корпуса мишени на стопорную планку, наглухо закрепленную на задней стенке мишени.
Индикатор «Есть связь» показывает готовность устройства к работе.
Индикатор «Огонь!» (красного свечения) разрешает стрельбу по мишени. Это такое состояние мишени, когда сервопривод и подъемная планка отошли от убоек, чем исключили риск их повреждения при попадании пулей в любую из убоек.
Индикатор «Отбой!» (зеленого свечения) загорается в период подъема убоек в исходное положение. При свечении этого индикатора стрельба должна быть прекращена.
Остальные элементы схемы обеспечивают приведение микропроцессора в рабочее состояние.
Программный код Блока управления мишенью также прилагается к данной статье.
Печатная плата Блока управления мишенью показана на рисунке.
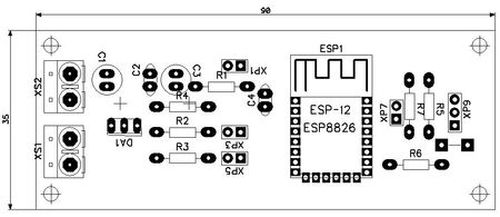
Рисунок 8. Печатная плата Блока управления мишенью (со стороны радиодеталей).
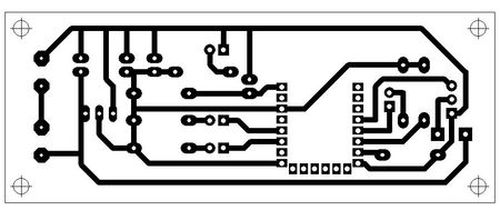
Рисунок 9. Печатная плата Блока управления мишенью (со стороны дорожек).
Конструкция мишени
Мишень состоит из корпуса, защищенного стальным листом, пяти убоек диаметром 5 см, подъемного механизма в виде сервопривода с металлической подъемной планкой и Блока управления мишенью.
Размеры корпуса мишени: 450 х 170 х 200 мм (ширина х глубина х высота).
Внешний вид мишени показан на рисунках. Внешний вид мишени с фронтальной стороны изображен на рисунке в начале статьи.

Рисунок 10. Мишень. Внешний вид с тыла.
Внутреннее расположение элементов мишени показано на рисунке.
Схема электрическая принципиальная Блока управления мишенью показана на рисунке.

Рисунок 11. Мишень. Внутреннее расположение элементов.
Схема электрическая принципиальная Блока управления мишенью показана на рисунке.

Рисунок 12. Мишень. Блок управления мишенью.
Фиксация убоек в вертикальном положении при отведении подъемной планки осуществляется ферритовыми магнитами.
Приложение:
espnow_target_control.ino Исходный программный код Пульта управления мишенью.
espnow_target.ino Исходный программный код Блока управления мишенью.
target_control_schema.dch Схема электрическая Пульта управления мишенью (DipTrace).
target_block_schema.dch Схема электрическая Блока управления мишенью (DipTrace).
target_control_pcb.dip Печатная плата Пульта управления мишенью (DipTrace).
target_block_pcb.dip Печатная плата Блока управления мишенью (DipTrace).
 Скачать архив
Скачать архив
Поделись с друзьями:
Уважаемый посетитель, Вы зашли на сайт как незарегистрированный пользователь.
Мы рекомендуем Вам зарегистрироваться или войти на сайт под своим именем.
| Всего комментариев: 0 | |
 Двухполярный блок питания
Двухполярный блок питанияот 27.06.2026
Ответов: 1786
Паяльная станцияот 08.06.2026
Ответов: 21
Какие провайдеры интернета заслуживают доверия?от 01.05.2026
Ответов: 3
Нужна помощот 25.02.2026
Ответов: 3
Помогите распознать трансформаторот 25.02.2026
Ответов: 6
Востановление трансформатораот 25.02.2026
Ответов: 4
Измеритель транзисторов не выпаивая из платы.от 05.01.2026
Ответов: 6
Вкусная темаот 22.10.2025
Ответов: 9
Ремонт паяльной станции silverflo 8586dот 02.09.2025
Ответов: 14
БП S-250-12 (Китай)от 20.06.2025
Ответов: 2
 Добавлено 30.07.2011
Добавлено 30.07.2011Просмотров 1327837
Лабораторный БП из компьютерного БП формата АТХ
 Добавлено 04.03.2012
Добавлено 04.03.2012Просмотров 1273472
Пусковое устройство для автомобиля
 Добавлено 15.01.2012
Добавлено 15.01.2012Просмотров 1155674
TL431, что это за "зверь" такой?
 Добавлено 17.10.2011
Добавлено 17.10.2011Просмотров 1138865
Двух-полярный лабораторный блок питания своими руками
 Добавлено 19.10.2013
Добавлено 19.10.2013Просмотров 984270
Компараторы, как они работают?
 Добавлено 14.10.2011
Добавлено 14.10.2011Просмотров 973359
Переделка компьютерного блока питания
 Добавлено 13.12.2016
Добавлено 13.12.2016Просмотров 840778
Переключение обмоток трансформатора лабораторных источников питания. Часть первая.
 Добавлено 14.06.2013
Добавлено 14.06.2013Просмотров 829325
Прописные истины для новичков.
 Добавлено 10.09.2012
Добавлено 10.09.2012Просмотров 825462
Способ снижения искажений и уровня помех в усилителях.
 Добавлено 19.10.2014
Добавлено 19.10.2014Просмотров 733717
Двух-канальный мощный лабораторный блок питания.
 Добавлено 30.09.2015
Добавлено 30.09.2015Просмотров 695160
Переключение обмоток трансформатора лабораторных источников питания. Часть вторая.
 Добавлено 10.08.2013
Добавлено 10.08.2013Просмотров 689820
Испытание электронных ламп
 Добавлено 09.04.2014
Добавлено 09.04.2014Просмотров 630930
TL494, что это за "зверь" такой?
 Добавлено 17.08.2018
Добавлено 17.08.2018Просмотров 582582
Простой лабораторный блок питания
 Добавлено 20.05.2016
Добавлено 20.05.2016Просмотров 513517
Ремонт трансформатора подсветки монитора Samsung 940N.
 Добавлено 19.05.2013
Добавлено 19.05.2013Просмотров 500969
"Электронный дроссель".
 Добавлено 09.11.2011
Добавлено 09.11.2011Просмотров 497903
Определяем тип трансформатора по номеру.
 Добавлено 23.07.2015
Добавлено 23.07.2015Просмотров 452868
Германий превыше всего
 Добавлено 05.05.2011
Добавлено 05.05.2011Просмотров 445200
Зарядное устройство с защитой.
 Добавлено 12.12.2013
Добавлено 12.12.2013Просмотров 403204
Мощный германиевый усилитель
 Добавлено 08.05.2011
Добавлено 08.05.2011Просмотров 392487
sPlan 7.0. Подробное руководство.
 Добавлено 05.04.2012
Добавлено 05.04.2012Просмотров 379751
Предпусковое зарядное устройство Орион PW 415
 Добавлено 01.03.2016
Добавлено 01.03.2016Просмотров 368589
Самодельная цифровая паяльная станция DSS.
 Добавлено 16.12.2013
Добавлено 16.12.2013Просмотров 356945
Шим-контроллеры серии UC184x, UC284x, UC384x
 Добавлено 31.01.2020
Добавлено 31.01.2020Просмотров 354296
Тороидальные трансформаторы
 Добавлено 30.07.2014
Добавлено 30.07.2014Просмотров 350696
Ламповый усилитель для компьютера.
 Добавлено 11.12.2011
Добавлено 11.12.2011Просмотров 344078
Информационная панель LCDIP2DS.
 Добавлено 17.10.2012
Добавлено 17.10.2012Просмотров 340379
Проектируем выходной трансформатор для лампового усилителя
 Добавлено 05.04.2017
Добавлено 05.04.2017Просмотров 338018
Доктор фьюзов «Atmega fusebit doctor».
 Добавлено 29.12.2012
Добавлено 29.12.2012Просмотров 327868
 Всего: 8469
Всего: 8469  Новых за месяц: 28 Новых за неделю: 5 Новых вчера: 2 Новых сегодня: 1
Новых за месяц: 28 Новых за неделю: 5 Новых вчера: 2 Новых сегодня: 1  Новый пользователь:
Новый пользователь: сайт за текущий день:
